
Jusqu’à présent, l’inspiration pour les robots souples provenait d’organismes contemporains. Récemment, une équipe de chercheurs a toutefois franchi une étape en combinant les concepts de robotique souple et de paléontologie pour concevoir un robot mou innovant inspiré du pleurocystitide, une créature marine ancestrale qui date de 450 millions d’années.
Des robots inspirés par le passé
Les robots conçus en s’inspirant du règne animal ont largement contribué à la recherche en offrant des perspectives approfondies sur le comportement et la biomécanique de divers animaux tels que les serpents, les lézards, les tortues de mer et les salamandres. L’exploration à l’aide de robots pour étudier des organismes éteints commence toutefois à peine à se développer.
Les créatures disparues suscitent pourtant un intérêt particulier, car la diversité morphologique qui guide actuellement la conception des robots ne représente qu’une fraction infime des plans corporels qui ont existé tout au long de l’histoire. Selon une estimation, les organismes vivants modernes ne représenteraient en effet que 1 % de toute la vie qui a jamais existé sur Terre.
Malgré ces opportunités prometteuses, l’apprentissage à partir d’organismes disparus présente des défis considérables et nécessite la reconstruction d’informations à partir de sources diverses telles que les fossiles et les analogues modernes. Il y a plusieurs mois, des chercheurs ont néanmoins fait un pas en avant dans ce domaine en imaginant un robot mou inspiré du pleurocystitide.
Un robot qui représentait un défi complexe
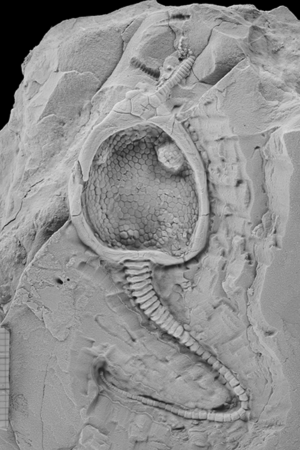
Les pleurocystitidés, liés aux échinodermes modernes comme les étoiles de mer et les ophiures, ont joué un rôle crucial dans l’évolution. Ils sont en effet considérés comme les premiers échinodermes capables de se déplacer en utilisant une tige musculaire pour se mouvoir sur le fond marin. Cependant, le fonctionnement de cette tige sous l’eau demeure mal compris en raison du manque de preuves fossiles, d’où l’intérêt de ces récents travaux.
La mise au point de ce robot mou a été un défi de taille. En collaboration avec des paléontologues spécialisés dans les échinodermes, les chercheurs ont rassemblé des images de fossiles, des tomodensitogrammes et d’autres preuves pour concevoir le corps et la tige du pleurocystitide. Le moulage d’élastomère et l’impression 3D ont été utilisés pour construire les différentes parties du robot.
Les essais visant à reproduire le mouvement du pleurocystitide avec la tige ont présenté des défis supplémentaires. La partie flexible du robot, qui utilisait du fil de nitinol, un alliage à mémoire de forme, présentait fréquemment des problèmes tels que la combustion et l’étirement permanent, ce qui nécessitait ainsi le remplacement fréquent des composants.
De plus, la reproduction de la tige musculaire molle s’est avérée compliquée en raison de la taille imposante et de la rigidité des moteurs traditionnels. Pour surmonter ces obstacles, les chercheurs ont choisi d’adopter un fil spécial appelé « muscle artificiel », composé d’un alliage de nickel et de titane. Ce matériau a la capacité de se contracter en réponse à une stimulation électrique, ce qui facilite ainsi la création d’un actionneur en forme de tige flexible.
Quelques leçons apprises et de belles perspectives
Cette réplique d’un pleurocystitide, également appelée « Rhombot », a permis aux chercheurs de décoder le mouvement de l’organisme et de résoudre d’autres mystères liés à l’évolution des échinodermes. Les simulations ont notamment révélé que des tiges plus longues amélioraient le mouvement, ce qui corrobore les preuves fossiles suggérant l’évolution vers des tiges plus longues au fil du temps chez les pleurocystitides.
Cette étude démontre que la robotique souple peut donc être utilisée avec succès pour recréer des organismes disparus et étudier leur locomotion et leur biomécanique. Cela ouvre la voie à de futures recherches qui offriront aux scientifiques l’opportunité d’explorer les principes biologiques et évolutifs régissant les formes de vie anciennes qui ne sont plus représentées dans le règne animal contemporain.
Les détails de l’étude sont publiés dans PNAS.